Macro Geneva Wheel/it
|
|
| Descrizione |
|---|
| Consente all'utente di creare un meccanismo Croce di Malta da zero. Versione macro: 1.0 Ultima modifica: 2014-09-21 Versione FreeCAD: All Download: ToolBar Icon Autore: Drei |
| Autore |
| Drei |
| Download |
| ToolBar Icon |
| Link |
| Raccolta di macro Come installare le macro Personalizzare la toolbar |
| Versione macro |
| 1.0 |
| Data ultima modifica |
| 2014-09-21 |
| Versioni di FreeCAD |
| All |
| Scorciatoia |
| Nessuna |
| Vedere anche |
| Nessuno |
{kind=link}
Descrizione
Consente all'utente di creare un meccanismo Croce di Malta da zero. Per modificare la dimensione dell'oggetto è necessario modificare i valori all'interno della Macro.

Utilizzo
Questa macro crea le parti principali di un meccanismo a forma di Croce di Malta. Dipende da sei valori che devono essere impostati nel codice, leggere i commenti nello script. Le variabili sono:
| Input | Output |
|---|---|
|
|
Link
Macro Geneva Wheel GUI: Una interfaccia grafica che permette all'utente di impostare i valori per creare un meccanismo Croce di Malta da zero.
Macro
Icona barra strumenti 
Macro_Geneva_Wheel.FCMacro
#Creation of a Geneva Wheel with Parametric values By: Isaac Ayala (drei)
#This Macro creates the main parts of a Geneva Wheel Mechanism
#It depends on six values that must be altered in the following code
#The variables are a, b, n, p, t and h.
#Definition for each variable
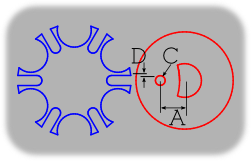
# Input
#a = Drive Crank Radius
#b = Geneva Wheel Radius
#n = Driven Slot Quantity
#p = Drive Pin Diameter
#t = Tolerance
#h = Height
# Output
#c = Distance Between Centers
#s = Slot Center Width
#w = Slot Width
#y = Stop Arc Radius
#z = Stop Disc Radius
#v = Clearance Arc
#Please note that you can alter the code so it depends on five values exclusively
#Just replace c, and either a or b with the following
# Keep value for a
#c = a/math.sin(math.pi/n)
#b = math.sqrt((math.pow(c,2))-(math.pow(a,2)))
# Keep value for b
#c = b/math.cos(math.pi/n)
#a = math.sqrt((math.pow(c,2))-(math.pow(b,2)))
from __future__ import division
import time
import math
from PySide import QtCore, QtGui
from FreeCAD import Base
import Part
#Inputs
a = 25.0
b = 60.0
n = 6
p = 4
t = 0.01
h = 5
T = 60
#Outputs
c = math.sqrt(pow(a,2) + pow(b,2))
s = a + b - c
w = p + t
y = a - (1.5 * p)
z = y - t
v = (b * z)/a
# Create the Drive Crank (Will be placed on the origin)
driveCrank = Part.makeCylinder(z, h)
driveCrank.translate(Base.Vector(0,0,0))
genevaWheelClearanceCut = Part.makeCylinder(b, h)
genevaWheelClearanceCut.translate(Base.Vector(-c,0,0))
driveCrank = driveCrank.cut(genevaWheelClearanceCut)
driveCrankBase = Part.makeCylinder((1.5*a), h)
driveCrankBase.translate(Base.Vector(0,0,-h))
driveCrank = driveCrank.fuse(driveCrankBase)
drivePin = Part.makeCylinder(p,h)
drivePin.translate(Base.Vector(-a,0,0))
driveCrank = driveCrank.fuse(drivePin)
# Create the Geneva Wheel (Will be placed on the x-axis on the left side)
genevaWheel = Part.makeCylinder(b,h)
genevaWheel.translate(Base.Vector(-c,0,0))
stopArc = Part.makeCylinder(y, h)
stopArc.translate(Base.Vector(((y-(b/2)),0,0)))
stopArc.rotate(Base.Vector(-c,0,0),Base.Vector(0,0,1),30)
for i in range(6):
stopArc.rotate(Base.Vector(-c,0,0),Base.Vector(0,0,1),60)
genevaWheel = genevaWheel.cut(stopArc)
slotLength = Part.makeBox(s,(2*w),h)
slotLength.translate(Base.Vector(-a,-w,0))
slotRadius = Part.makeCylinder(w,h)
slotRadius.translate(Base.Vector(-a,0,0))
slot=slotLength.fuse(slotRadius)
for i in range(6):
slot.rotate(Base.Vector(-c,0,0),Base.Vector(0,0,1),60)
genevaWheel = genevaWheel.cut(slot)
# Display Result
Part.show(driveCrank)
Part.show(genevaWheel)